
ī”ė┌ą┬ę╗┤·ÖCŲ„╚╦Ż¼╠žäe╩Ū Ė„ĘNęŲäėÖCŲ„╚╦Ż¼ätę¬Ū¾Š▀ėąūįąŻš²─▄┴”║═Ę┤æ¬ŁhŠ│▓╗£yūā╗»Ą──▄┴”ĪŻęčėąįĮüĒįĮČÓĄ─ÖC Ų„╚╦Š▀ėąĖ„ĘN═Ō▓┐ĖąėX─▄┴”ĪŻ
1. æ¬ė├╬óŽ▐╬╗ķ_ĻPĄ─╬ÕųĖÖCąĄ╩ų
╬óą═ķ_ĻP┐╔─▄╩ŪĮėė|é„ĖąŲ„ZĮøØ·║═Z│Żė├Ą─ŅÉą═ĪŻ╬óķ_ĻPĄ─░▓čb╬╗ų├æ¬▒ŻšŽ╣żū„┐šķgā╚Ą─╬’¾w▒▄├Ō ╩┬╣╩ąį┼÷ū▓ĪŻ«öčbėąņ`├¶į¬╝■ĢrŻ¼▀@ŅÉįOéõ▀Ć─▄▒Żūo╬’¾w▓╗╩▄ĄĮ▀^┤¾Ą─ū„ė├┴”ĪŻ
łD6-13▒Ē╩Šę╗éĆĮėĄĮÖCąĄ╩ųĄ─Įėė|ķ_ĻPŽĄĮyĪŻ▀@ éĆÖCąĄ╩ųŠ▀ėąš¹¾w╩Į╩ųšŲŻ¼Ė„éĆķ_ĻP╣▓ė├ę╗ŚlĄžŠĆĪŻ ▀@ĢrĄ─ÖCąĄ╩ų╠Äė┌┐š▌dĀŅæBŻ¼╬ÕéĆ╬óķ_ĻPŠ∙┤“ķ_Ż¼ę“ Č°Ę┼┤¾Ų„Ą─▌ö╚╦Č╦Š∙×ķĖ▀ļŖ╬╗Ż¼╝┤╠Äė┌▀ē▌ŗĪ░1Ī▒ĀŅ æBĪŻ╚ń╣¹ėą╚╬ę╗éĆ╬óķ_ĻPę“╩ųųĖĮėė|ĄĮ╬’¾wČ°Įė═©Ż¼ ─Ū├┤Š═╦═ę╗éĆ▀ē▌ŗĪ░0Ī▒ų┴Ę┼┤¾Ų„ĪŻ
2. Ė¶ļx╩ĮļpæBĮėė|é„ĖąŲ„
Ė¶ļx╩ĮļpæBĮėė|é„ĖąŲ„ŽĄĮyų„ę¬ė╔ļpĘĆæBķ_ĻPĮM│╔ĪŻ«ö░č┤╦ķ_ĻPčbį┌ÖCŲ„╚╦╩ų▒█╔ŽĢrŻ¼─▄ē“▒▄├Ō╩ų▒█ ┼cšŽĄK╬’ŽÓ┼÷ū▓ĪŻ╣żśIÖCŲ„╚╦╩ų▒█╔Žę╗░Ń▓╗čbįO▀@ĘN ▒Żūočbų├ĪŻ╚ń╣¹░čķ_ĻPčbį┌ÖCąĄ╩ų─®Č╦(╚ńŖA╩ų)╔ŽŻ¼ ─Ū├┤Ųõū„ė├Š═▒╚▌^┤¾ĪŻłD6-14▒Ē╩Ščbėą▀@ĘNé„ĖąŲ„Ą─ŖA╩ųĪŻ▀@ĘNé„ĖąŲ„Ą─ųžÅ═Č╚┐╔▀_1”╠m, Ęų▒µČ╚×ķ2 ”╠mĪŻ
łD6-14Ą─ė|ėXé„ĖąŲ„─▄ē“╠ß╣®Ė³ČÓĄ─ą┼ŽóĪŻ╚ń╣¹ę¬▀@éĆŖA╩ų▀_ĄĮ╚½▓┐┐╔▀_┐šķgŻ¼─Ū ├┤é„ĖąŲ„1Ī½4īó░l│÷░▓╚½Įėė|ą┼╠¢Ż¼▓óī”╣żū„▓▀┬į«a╔·ė░ĒæĪŻ╚ń╣¹é„ĖąŲ„1▒╗ė|░lŻ¼─Ū ├┤ÖCąĄ╩ųĄ─ŖA╩ų▒žČ©Ž“Ž┬ęŲäėĪŻé„ĖąŲ„5║═6Š▀ėą▓╗═¼Ą─╣”ė├ĪŻ╚ń╣¹═¼Ģrė|░l╦³éāŻ¼Č°Ūę ŖA╩ų┐┌▓┐ŠÓļxAB ×ķZČ╠Ż¼─Ū├┤▀@▒Ē├„ŖA╩ųø]ėąūźĄĮ╬’¾wĪŻ╚ń╣¹é„ĖąŲ„5║═6ų╗ėąę╗éĆ▒╗ ė|░lŻ¼Č°Ūę AB Ą─ŠÓļx×ķZ┤¾Ż¼─Ū├┤▀@▒Ē├„ŖA╩ųęčęŲäėŻ¼Č°Ūę┼÷ĄĮę╗éĆ▒╗ŖA╩ųūźūĪĄ─╬’¾w ╗“šŽĄKĪŻ╚ń╣¹é„ĖąŲ„5║═6Š∙▒╗╝ż░lŻ¼Č°ŪęAB ąĪė┌AB Ą─Z┤¾ųĄŻ¼─Ū├┤▀@šf├„ŖA╩ųūźūĪ ┴╦─│éĆ╬’¾wĪŻ
ŠÓļxAB ╠ß╣®┴╦ŖA╩ųā╚╬’¾wĄ─ą┼ŽóŻ¼╚ńŠSöĄĄ╚ĪŻ░č▀@ĘNą┼Žó╝ėų┴öĄō■Äņ.Š═─▄ē“▒ŻūC ▀Mąą│╔╣”Ą─▓┘ū„ĪŻ

3. å╬─ŻöM┴┐é„ĖąŲ„
į┌įŁ└Ē╔ŽŻ¼å╬─ŻöM┴┐é„ĖąŲ„╩Ūę╗éĆ▌ö│÷š²▒╚ė┌Šų▓┐ æ¬┴”Ą─ŽĄĮyĪŻ┐╔ė├╦³üĒÖz£yņoæB╠žąį(╬╗ų├Öz£y)║═äėæB ╠žąį(┴”╗“æ¬┴”Öz£y)ĪŻĖ∙ō■╦³į┌ÖCŲ„╚╦╔ŽĄ─░▓čb╬╗ų├ęį ╝░╦³┼cŲõ╦¹é„ĖąŲ„Ą─┬ōŽĄŪķørŻ¼Ųõū„ė├╩ŪČÓśėĄ─ĪŻŽ┬├µ ┼eā╔éĆ└²ūėĪŻ
(1)ś“╩ĮĮėė|╠Į£yŲ„
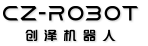
ś“╩ĮĮėė|╠Į£yŲ„ė╔├¶Ėąį¬╝■ĮM│╔Ż¼╦³─▄ē“£y┴┐ė╔╠Į £yŲ„╩®ė┌╬’¾wĄ─┴”F Ą─╚²éĆĘų┴”F, ĪóF, ║═ F₂, ęŖłD6-15ĪŻ ╠Į£yŲ„Ą─╠ĮŅ^ų▒ÅĮ×ķ3mm, ķLČ╚×ķ12mm, ╦³┼c╬’¾wŽÓĮė ė|Ż¼▓ó░čē║┴”é„▀fĄĮę╗éĆ╚ßąįĄ─╩«ūųą╬╚~Ų¼╔ŽĪŻ╚~Ų¼╔Ž £y┴┐ļŖś“
čbėą3Ī½4éĆ£y┴┐ś“Ż¼ė├ė┌Öz£yē║┴”Ęų┴┐ F. ęį╝░ā╔éĆ┼żŠžM, ║═ M( Ęų äe ī” æ¬ox ║═ oy ▌S)ĪŻī”ŽĄĮy▀Mąą┐žųŲŻ¼╩╣╠ĮŅ^ē║┴”į┌╚╬║╬ĘĮŽ“Č╝ŠS│ų▓╗ūāĪŻ╠ĮŅ^┐╔čž x,y ║═z ╚²éĆūįė╔ Č╚ęŲäėĪŻ╠ĮŅ^▀\äė┐žųŲ┐╔ė╔│╠ą“ūįäė▀MąąŻ¼ę▓┐╔ė├┐žųŲ║ą╩ųäė┐žųŲĪŻĮø▀^▀m«öĄ─╠Į£yŻ¼Š═ ─▄ē“ų¬Ą└ÖCŲ„╚╦ŁhŠ│Ą─Ė┼ørĪŻ
(2)ņ`├¶ųĖŅ^ŖA│ųŲ„
łD6-16▒Ē╩Š│÷ÖCŲ„╚╦ā╔╩ųųĖųąĄ─ę╗éĆĪŻ├┐éĆ╩ųųĖčbėą7éĆņ`├¶Ą─┐žųŲ░Õ.ė├ęįÖz£y ÖCŲ„╚╦─®Č╦čbų├┼cŁhŠ│Ą─Įėė|ĪŻ├┐éĆ╩ųųĖā╚▓┐čbįO18éĆå╬─ŻöM┴┐é„ĖąŲ„Ż¼Ųõū„ė├įŁ└Ē╚ń Ž┬Ż║├┐éĆ░┤Ōoė|░lę╗Ą└▒╗š┌č┌Ą─╣Ō╩°Ż¼Š═Ž±╩▄ĄĮæ¬┴”ū„ė├ę╗śėĪŻ╣Ō╩°Å─░l╣ŌČ■śO╣▄░l│÷Ż¼ ▓óė╔╣ŌŠ¦¾w╣▄Įė╩šĪŻ▀@éĆŽĄĮy─▄ē“┐žųŲŖAŠo┴”Ą─£y┴┐┼cš{š¹Ż¼▓óĮo│÷▒╗ŖA│ų╬’¾wĄ─┤ų┬į ą╬ ĀŅ ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



